
ગેન્ટ્રી રોબોટમાં કૉલમ ફ્રેમ, એક્સ-અક્ષ ઘટક, વાય-અક્ષ ઘટક, ઝેડ-અક્ષ ઘટક, ફિક્સ્ચર અને કંટ્રોલ બોક્સનો સમાવેશ થાય છે.
તે લંબચોરસ X, Y, Z ત્રિ-પરિમાણીય સંકલન પ્રણાલી પર આધારિત એક સંપૂર્ણ સ્વચાલિત ઔદ્યોગિક સાધન છે, જે વર્કપીસની સ્થિતિને સમાયોજિત કરી શકે છે અથવા વર્કપીસની ટ્રેજેક્ટરી હિલચાલને અનુભવી શકે છે. તેના નિયંત્રણ કોરને ઔદ્યોગિક નિયંત્રકો દ્વારા લાગુ કરવામાં આવે છે.
નિયંત્રક વિવિધ ઇનપુટ સિગ્નલોનું વિશ્લેષણ કરે છે અને પ્રક્રિયા કરે છે, તાર્કિક ચુકાદાઓ બનાવે છે, પછી X, Y અને Z અક્ષો વચ્ચે સંયુક્ત ગતિ પૂર્ણ કરવા અને સંપૂર્ણ સ્વચાલિત ઓપરેશન પ્રક્રિયાઓના સંપૂર્ણ સેટને સમજવા માટે દરેક આઉટપુટ ઘટકને એક્ઝેક્યુશન આદેશો જારી કરે છે.
તેનો ઉપયોગ પ્રોડક્ટ એસેમ્બલી અને ટ્રાન્સપોર્ટેશન, કન્વેયર સિસ્ટમ્સ અને માનવરહિત વર્ક સાઇટ્સમાં થાય છે. તેનો ઉપયોગ અસ્થાયી સંગ્રહ અને લોજિસ્ટિક્સ માટે એક મહત્વપૂર્ણ પેરિફેરલ સાધનો તરીકે થઈ શકે છે અને સરળ ઉપયોગ માટે હોસ્ટ સાધનો સાથે લવચીક રીતે મેચ કરી શકાય છે. એપ્લિકેશન ઇન્ડસ્ટ્રીઝ જેમાં સામેલ છે: અંતિમ એસેમ્બલી, પેટા-એસેમ્બલી, પ્રોસેસિંગ, ટેસ્ટિંગ, ડીબગીંગ અને ઉત્પાદનોનું પરિવહન અને તેથી પુત્ર.
ઉત્પાદનની વિશેષતાઓ ગ્રાહકોને વિવિધ પ્રકારની સામગ્રી હેન્ડલિંગમાં ઓછી કાર્યક્ષમતા અથવા ઉચ્ચ હેન્ડલિંગ જોખમોની સમસ્યાઓને ઉકેલવામાં મદદ કરે છે, જેથી હેન્ડલિંગ જોખમોને સરળતાથી અને ઝડપથી ઘટાડી શકાય, સમય, પ્રયત્નો, શ્રમ બચાવી શકાય અને શ્રમ પણ બદલી શકાય.
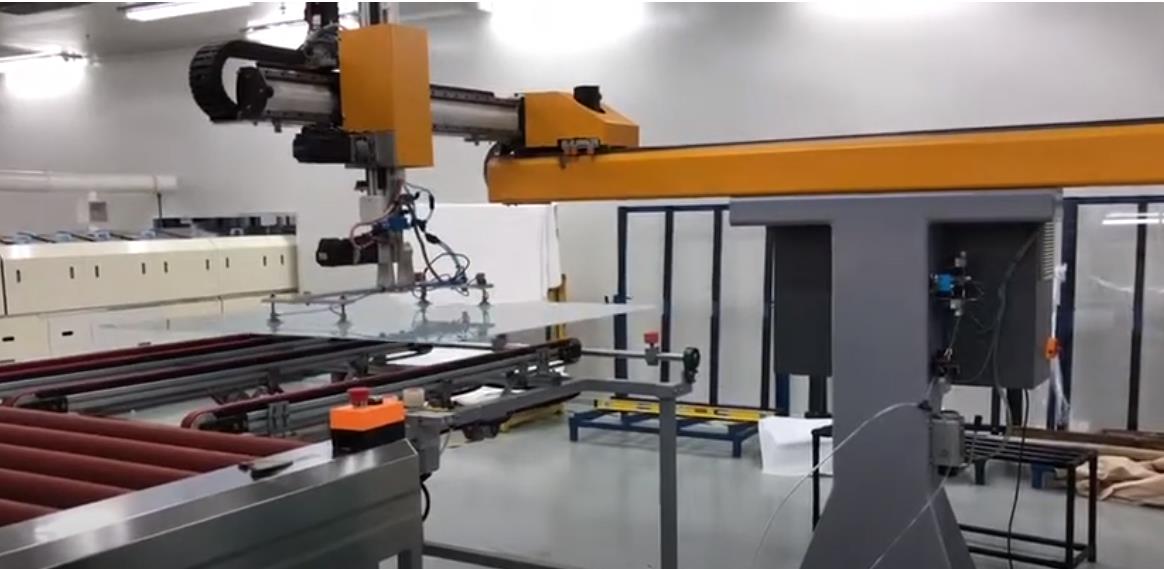
 કાચ માટેના આ ગેન્ટ્રી ટ્રસ મેનિપ્યુલેટર હેન્ડલિંગ ડિવાઇસમાં કૉલમ અને કૉલમ પર ઇન્સ્ટોલ કરેલા ક્રોસ બીમનો સમાવેશ થાય છે. ક્રોસ બીમ સ્લાઇડ રેલ્સ સાથે સ્થાપિત થયેલ છે. સ્લાઇડ રેલ્સ ટ્રાંસવર્સ સ્લાઇડિંગ ઉપકરણ સાથે સ્થાપિત થયેલ છે. ટ્રાંસવર્સ સ્લાઇડિંગ ડિવાઇસ વર્ટિકલ સ્લાઇડિંગ ડિવાઇસ અને ન્યુમેટિક સક્શન કપ ડિવાઇસ સાથે ઇન્સ્ટોલ કરેલું છે. તે અનુભવી શકાય છે પરિવહન પદ્ધતિ ત્રિ-પરિમાણીય અવકાશમાં એક નિશ્ચિત બિંદુએ આગળ વધે છે, સક્શન કપ દ્વારા કાચને ચૂસી લે છે, પ્રથમ X-અક્ષ પર બાજુથી ખસેડો, પછી નિયુક્ત સ્થાન પર 90 ડિગ્રી ફ્લિપ કરો, અને પછી ઉપર જાઓ. અને Y-અક્ષ પર નીચે. સેટ પોઝિશન પર પહોંચ્યા પછી, ગ્લાસને છોડો અને તેને ગ્લાસ શેલ્ફ પર મૂકો. સમગ્ર ઉપકરણની માળખાકીય સ્થિરતા ખૂબ ઊંચી છે, જે હેન્ડલિંગમાં મોટા પ્રમાણમાં સુધારો કરે છે. કાર્યક્ષમતા
કાચ માટેના આ ગેન્ટ્રી ટ્રસ મેનિપ્યુલેટર હેન્ડલિંગ ડિવાઇસમાં કૉલમ અને કૉલમ પર ઇન્સ્ટોલ કરેલા ક્રોસ બીમનો સમાવેશ થાય છે. ક્રોસ બીમ સ્લાઇડ રેલ્સ સાથે સ્થાપિત થયેલ છે. સ્લાઇડ રેલ્સ ટ્રાંસવર્સ સ્લાઇડિંગ ઉપકરણ સાથે સ્થાપિત થયેલ છે. ટ્રાંસવર્સ સ્લાઇડિંગ ડિવાઇસ વર્ટિકલ સ્લાઇડિંગ ડિવાઇસ અને ન્યુમેટિક સક્શન કપ ડિવાઇસ સાથે ઇન્સ્ટોલ કરેલું છે. તે અનુભવી શકાય છે પરિવહન પદ્ધતિ ત્રિ-પરિમાણીય અવકાશમાં એક નિશ્ચિત બિંદુએ આગળ વધે છે, સક્શન કપ દ્વારા કાચને ચૂસી લે છે, પ્રથમ X-અક્ષ પર બાજુથી ખસેડો, પછી નિયુક્ત સ્થાન પર 90 ડિગ્રી ફ્લિપ કરો, અને પછી ઉપર જાઓ. અને Y-અક્ષ પર નીચે. સેટ પોઝિશન પર પહોંચ્યા પછી, ગ્લાસને છોડો અને તેને ગ્લાસ શેલ્ફ પર મૂકો. સમગ્ર ઉપકરણની માળખાકીય સ્થિરતા ખૂબ ઊંચી છે, જે હેન્ડલિંગમાં મોટા પ્રમાણમાં સુધારો કરે છે. કાર્યક્ષમતા

પોસ્ટ સમય: માર્ચ-18-2024



